
✦
关键词:美国海军数字孪生;NDT-CBM(海军数字孪生视情维修能力)原型;航空/电子战系统数字孪生;UUV(无人水下航行器)数字孪生倡议
✦
一、导言
在舰艇老化、维修积压与高强度部署并存的背景下,美国海军正将数字孪生从单纯的数字化建模工具,升级为贯穿装备研制、试验验证、维修保障与能力升级的工程化手段。2025年11月,美国海军海上系统司令部(NAVSEA)在《舰队韧性的下一代支撑:数字孪生》一文中指出,若每艘舰艇作战可用性提高1%,其效果“相当于在不新造舰的情况下为舰队增加3艘新舰”,凸显了数字孪生对提升舰队韧性和保障效率的核心价值。
从近年公开实践看,美国海军数字孪生的重点已不再是单纯的数字建模,而是面向集成验证、保障决策和无人自主能力开发的工程闭环应用:既可用于舰艇上舰前的系统集成验证、复杂系统故障排查与升级回归测试,也能通过传感器与环境机理的仿真生成数据,支撑无人系统自主算法的训练。
本文围绕美国海军数字孪生典型应用展开梳理,总结其发展路径与演进趋势,并结合我国海军装备发展实际,提出启示建议。
二、典型应用领域与案例
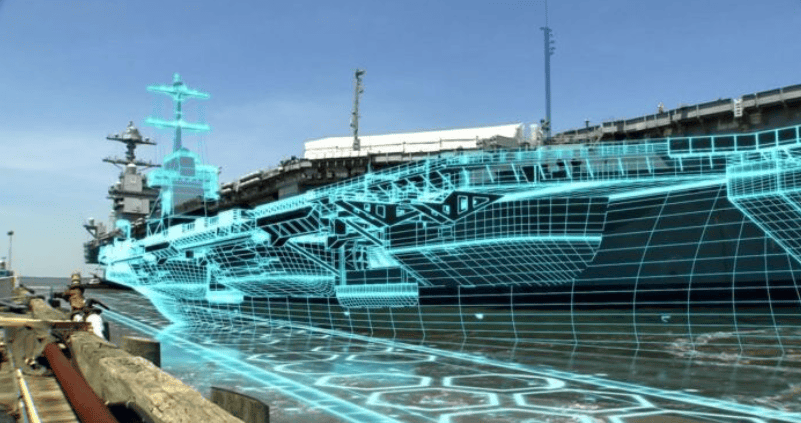
2.1 “数字林肯”(Digital Lincoln):航母系统级数字化模型与上舰前置验证
“数字林肯”的落地载体虽为“亚伯拉罕·林肯”号航空母舰(CVN-72),但其核心内涵并非航母舰体的外形孪生,而是面向舰载能力集合的系统级数字模型。该案例表明,美国海军已开始将数字孪生前移至上舰/交付前阶段,使其成为降低系统集成风险的重要工具。
图1:美国海军航空母舰“亚伯拉罕·林肯”号(CVN-72)
2.2 NDT-CBM原型:数字孪生落地HM&E连续监测与维护决策
2021年9月,美国海军海上系统司令部(NAVSEA)披露,其卡德罗克分部联合多个作战中心,依托海军自卫测试舰(SDTS)推进数字孪生原型项目,面向舰艇船体—机械—电气(HM&E)关键系统开发自主、连续监测能力,并形成“海军数字孪生视情维修能力”(NDT-CBM)。项目核心并非构建静态模型,而是持续分析系统健康状态,向决策者提供可直接使用的维护信息。SDTS因可提供接近实装条件的真实海上测试环境,被选为该项目的验证平台。该实践表明,美国海军正推动数字孪生由状态感知工具向维护决策支撑能力延伸。
2.3 航空/电子战系统数字孪生:以ALQ-99“信号级排障与升级验证”为例
复杂航电与电子战系统的故障,往往由信号链路异常、接口时序不匹配、软硬件耦合问题与复杂工况叠加等多重因素引发,故障定位难度大。2023年9月,美国海军在官方通报中明确,其相关项目已将数字孪生技术应用于航空/电子战系统的“信号级”故障定位:在数字孪生体中调整平台与集成系统的多路信号输入及组合方式,通过观察系统实时行为响应,精准定位故障根源。
该报道还明确,项目选取ALQ-99战术干扰系统的吊舱接口单元作为初始测试对象,重点验证了数字孪生技术在装备设计、故障排查、仿真分析与功能增强等场景的实用价值,并将系统升级方案尽可能前置至数字环境中验证,大幅减少外场拆装与反复验证的成本。
图2:ALQ-99电子干扰系统
这一案例的核心经验可概括为:将“信号—行为—故障机理”的关联复现能力,固化为标准化的回归测试流程,让航空/电子战系统的排障与升级验证,从传统的“经验驱动、外场试验驱动”,转向“可控变量、可重复验证”的工程闭环模式。
2.4 水下无人系统:UUV声呐传感器孪生与合成数据闭环构建
水下无人系统的发展瓶颈,并不主要在算力,而在于声呐数据获取成本高、海洋环境变量复杂、实海试验难以重复,导致自主算法训练与验证长期受限。2025年8月,美国海军水面作战中心巴拿马城分部(NSWC PCD)披露“UUV(无人水下航行器)数字孪生倡议”,其核心是为自主水下无人系统的声呐传感器建立虚拟表征,并利用物理机理驱动的仿真生成声呐数据,用于支撑AI、机器学习和统计模型开发。官方信息显示,该项目使用的MASTODON声呐仿真工具集由美国海军研究办公室资助,相关代码和文档可在GitHub平台查询。由此可见,美国海军正通过“传感器孪生+机理仿真+数据生成”的技术路径,破解无人水下系统数据获取难、实海验证受限的现实瓶颈。
图3:无人水下航行器(UUV)的数字孪生技术演示
在此基础上,一些企业公开材料也提供了补充参考。比如美国SAIC公司提到,仿真与数字孪生技术已被用于支撑水下无人蜂群的训练、验证与迭代,技术路径正从单一传感器建模,走向面向任务场景的自主能力开发。总体看,该方向已形成清晰路径:通过传感器孪生建立虚拟表征,依托机理仿真生成多样化场景数据,再用于算法训练,并结合实测试验数据持续校准模型边界,最终形成“仿真生成—算法训练—实测回灌”的闭环。
图4:美国Integer公司和伍兹霍尔海洋研究所团队的REMUS 100 UUV
图5:海上测试展示的可操作船载/船外数字孪生系统
三、美国海军数字孪生的发展趋势与演进方向
从近年公开实践看,美国海军数字孪生正呈现出三个明显趋势。
3.1 应用环节前移
美国海军数字孪生正由主要服务于服役阶段保障与维护决策的工具,进一步前移并拓展至设计论证、系统集成、虚拟试验与评估阶段。这一趋势早在“数字林肯”项目中已初步显现:其重点不在于平台外形复刻,而在于上舰/交付前对系统接口、信息流和能力耦合关系开展前置验证,从源头降低实装调试、系统集成与后期改装中的风险和返工。
3.2 应用对象拓展
美国海军数字孪生的应用对象,已从单一设备状态监测,拓展至船体—机械—电气(HM&E)关键系统、航空电子战系统,以及无人水下平台传感器与自主算法开发,呈现由单系统向“系统之系统”延伸的趋势。其关注重点也由单点健康评估,逐步转向复杂系统交互、任务环境适应与跨系统协同优化。
值得注意的是,这一拓展趋势也正在向新一代水面作战舰艇延伸。NAVSEA 2025年公开资料显示,数字孪生能力已由早期验证逐步扩展到航母、潜艇、水面作战舰艇和无人系统;与此同时,GAO 2025年文件显示,下一代驱逐舰DDG(X)的设计与发展正加快引入数字线程、基于模型的系统工程等方法。由此可见,美国海军数字孪生的应用边界正从现役平台保障环节,进一步外延至下一代舰艇的设计与能力生成过程。
图6:美国下一代驱逐舰DDG(X)设计概念草图
3.3 运行模式升级
未来数字孪生的关键不在于建立一次性模型,而在于形成“实时感知—机理仿真—分析预测—决策输出—数据回灌”的持续迭代闭环。随着数字工程、数字试验和持续保障机制不断完善,数字孪生将逐步从项目级试点能力转化为装备体系级工程能力,成为提升舰队可用性、优化维护保障和支撑无人自主能力演进的重要支撑。
四、对我国海军数字孪生建设的启示
4.1 坚持问题牵引,先从关键系统跑通最小闭环
推进海军装备数字孪生建设,不宜一开始追求“全舰覆盖、全系统建模”,而应聚焦影响装备可用性和保障效率的关键环节,优先从推进、供配电、关键辅机及任务系统高频故障部位切入,先跑通“状态感知—机理分析—维修建议—结果回灌”的最小应用闭环,形成可复制模板后再逐步扩展。
4.2 坚持数据优先,夯实数字线程基础
数字孪生的关键不在于可视化展示,而在于数据、模型和应用链路是否贯通。应把数据字典、接口规范、模型管理和版本基线作为基础工程推进,打通设计、试验、列装、使用、维修和改装等环节的数据链路,为集成验证、故障排查和保障决策提供支撑。
4.3 坚持可信可用,前置验证认证与安全治理
数字孪生进入维修保障链路,前提是可信、可控、可用。应同步建立验证、确认与认证机制,明确模型用途、适用边界和误差范围,防止简单外推;同时加强敏感数据和关键模型安全管理,落实分级授权、最小权限和全过程审计,确保应用安全可靠。
4.4 坚持长期运营,以实战化指标检验成效
数字孪生不是一次性建设成果,而是需要持续校准和迭代的工程能力。应将考核重点从“建了多少模型”转向“装备可用性是否提升、维修周期是否缩短、预测是否更准”,并建立相应的责任体系和保障机制,推动数字孪生由项目应用走向体系能力。 (北京蓝德信息科技有限公司)返回搜狐,查看更多